
Binghao Huang
@binghao_huang • 2,366 subscribers
CS PhD student @Columbia advised by @YunzhuLiYZ. MechE @UCSD w/ @xiaolonw. Research Intern @amazon FAR . Ex-@NVIDIA. Embodied AI/Robot Learning.
Shorts





Videos

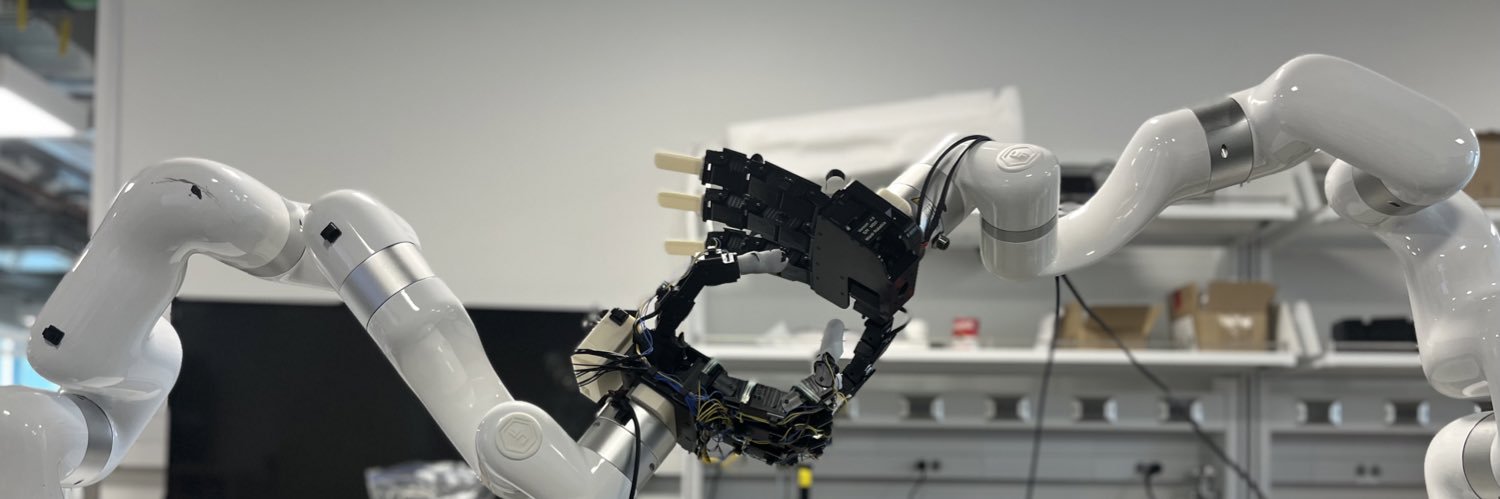
Can we bring human-like Touch to robots🤖? Introducing our CoRL work on 3D-ViTac. Humans rely on both vision 👁️ and touch 🫳 for complex tasks. With combined visual-tactile sensing, robots can now tackle challenging tasks, like precise in-hand reorientation, fragile objects grasping. Website: #Robotics #CoRL2024 #Touch #tactile #AI #ML
Binghao Huang49,544 görüntüleme • 1 yıl önce

Daha fazla içerik yok.