
Cornell University
@Cornell • 403,757 subscribers
Learning. Discovery. Engagement. Join the Cornell conversation.
Shorts
Videos

Gardeners experiment every time they sow a new vegetable, and sometimes it fails: blighted tomatoes, moth-eaten cabbage, plants that never flower. “That’s part of gardening,” said Noel Harradine, a master gardener volunteer with Cornell Cooperative Extension Wayne County, one of more than 100 CCE gardeners across the state working to take some trial and error out of the process by testing varieties to find what grows best in New York. Harradine’s work is part of CCE’s statewide Vegetable Variety Trial Garden program, a long-standing initiative to help New York gardeners choose the best-performing varieties for their regions. Across 37 counties this year, master gardener volunteers have sown select vegetables in CCE garden beds and are now collecting data and evaluating vegetables for taste, yield, and ease of growing. The observations are collected in a public web forum and shared with Cornell researchers and extension staff, as well as the sponsoring seed company. Read more:
Cornell University11,548 次观看 • 6 天前

As psychedelic drugs gain more support from the medical community as a potential treatment for severe depression – and with the U.S. government relaxing its regulatory constraints – there remains a vast gap in understanding how the drugs work on the brain. Alex Kwan, Ph.D. ’09, professor of biomedical engineering in Cornell Duffield College of Engineering, is at the center of a multidisciplinary investigation that is exploring the basic neurobiology and mechanics behind psychedelic compounds such as psilocybin. Read more:
Cornell University15,161 次观看 • 9 天前
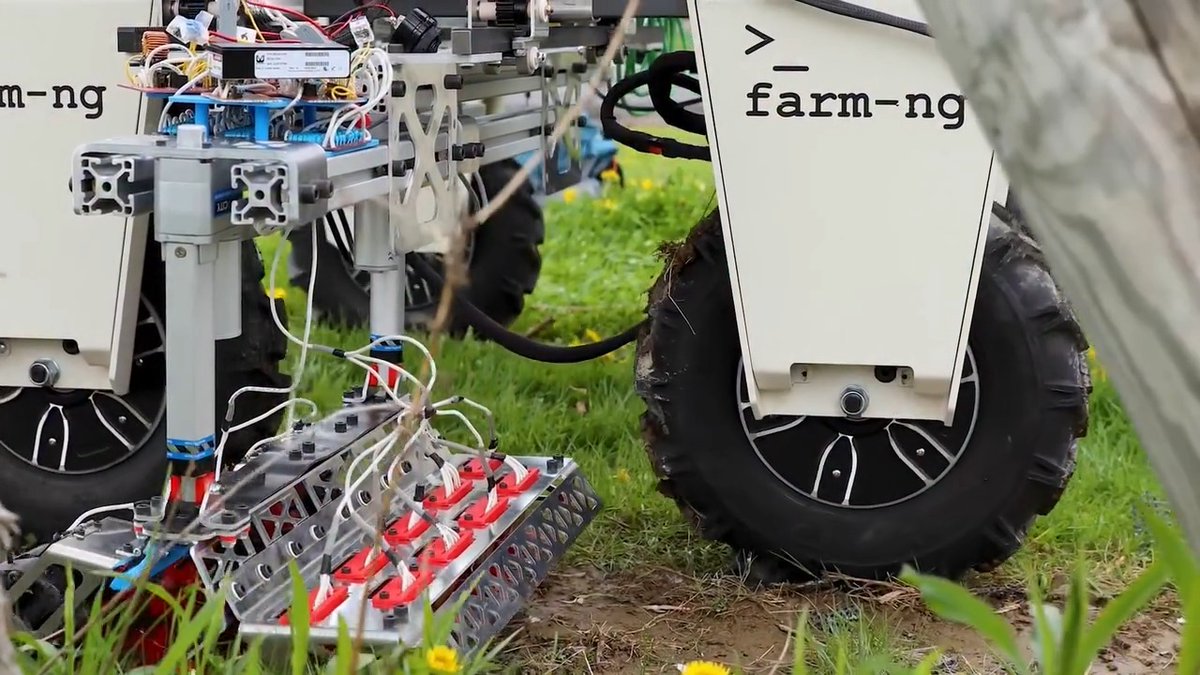
A team of undergraduates from Cornell CALS and Cornell Duffield College of Engineering beat out 95 other teams to take the grand prize at The Farm Robotics Challenge with their invention: an autonomous robot that kills weeds with electricity. Their robot can travel through a vineyard or orchard without a human operator, zapping weeds with a small amount of electricity, saving labor and energy, and preventing crop loss, without the use of herbicides. Read more:
Cornell University27,473 次观看 • 1 个月前

Through his fusion of performance on the field and on the stage, a passion for storytelling and leadership drives James Reinbold ’26 to find his flow state. He bridges the gap between the brotherhood of the Cornell football team and the creative community of Performing and Media Arts—one play and one scene at a time. This is his Cornell story. CornellArts&Sciences Cornell Big Red Cornell Football
Cornell University15,673 次观看 • 2 个月前



To our newest Cornellians, the #Cornell2028 class! 🐻❤️ Celebrate this milestone and prepare to join our vibrant Big Red community of thinkers, innovators, and game-changers. Be inspired, grow, and leave your own lasting impact on Cornell. We can't wait to welcome you this fall!
Cornell University32,004 次观看 • 2 年前
For over 20 years, Nancy Du, associate professor of pathology and laboratory medicine and the Rasweiler Family Research Scholar in Cancer Research at Weill Cornell Medicine, has researched how metastatic cancer arises. With a $500,000 grant over three years from the Congressionally Directed Medical Research Programs at the U.S. Department of Defense (DoD), she was poised to study how to prevent cancer from spreading to the bones of patients with estrogen receptor-positive breast cancer. But in April, a stop-work order brought her research to a halt. More at
Cornell University11,546 次观看 • 1 年前
没有更多内容可加载