Загрузка видео...
Не удалось загрузить видео
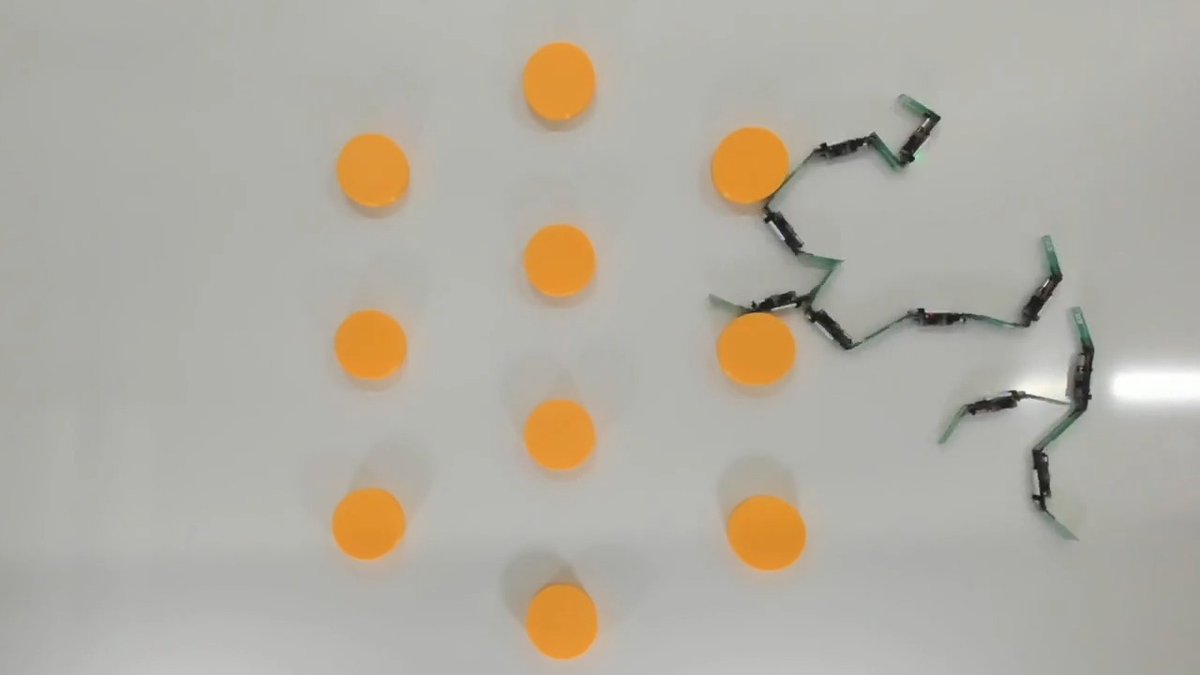
Each weaver ant can pull on a leaf much harder when in a group than when it works alone. The ants’ sticky feet and coordinated legwork, researchers believe, improve the ants’ collective efficiency—a finding that may provide insights into how to build and coordinate swarms of robots that work... show more

50,657 просмотров • 10 месяцев назад •via X (Twitter)
Комментарии: 0
Нет доступных комментариев
Здесь появятся комментарии из оригинального поста