Loading video...
Video Failed to Load
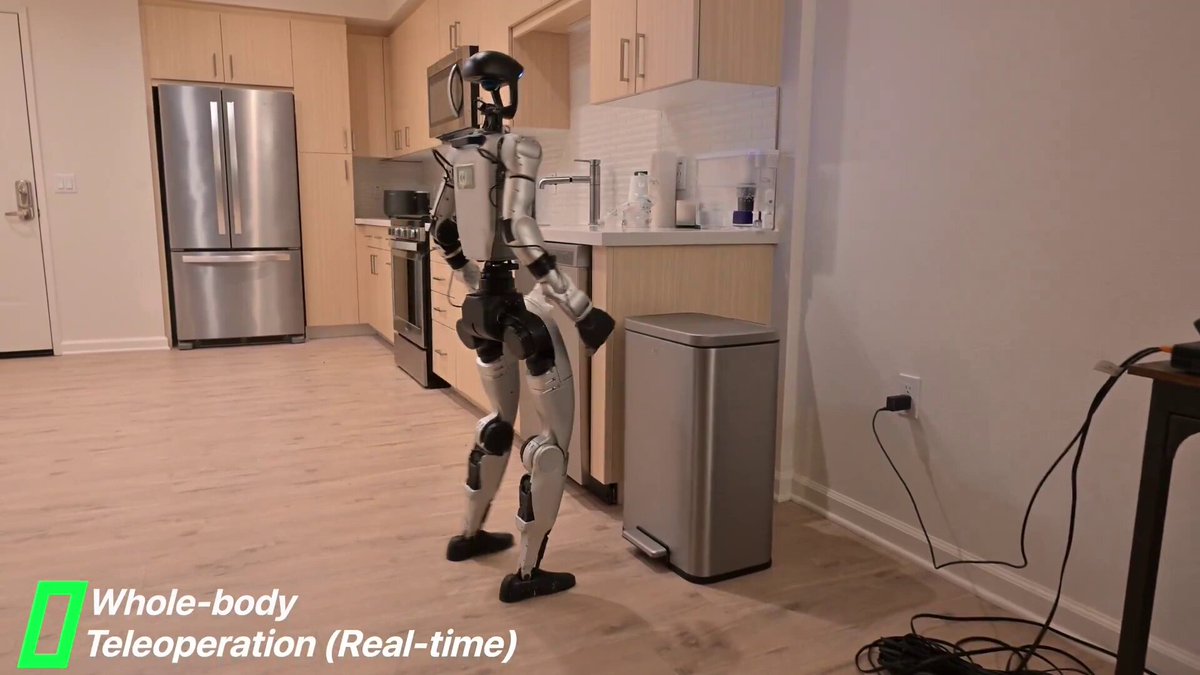
NVIDIA just announced EgoScale 🤖🧠 NVIDIA Research has uncovered a log-linear scaling law for robot dexterity by pretraining VLA models on over 20,000 hours of egocentric human video This massive dataset is 20 times larger than previous efforts and proves that robot intelligence follows a predictable path: the more... show more

43,727 views • 3 months ago •via X (Twitter)
0 Comments
No comments available
Comments from the original post will appear here