Video yükleniyor...
Video Yüklenemedi
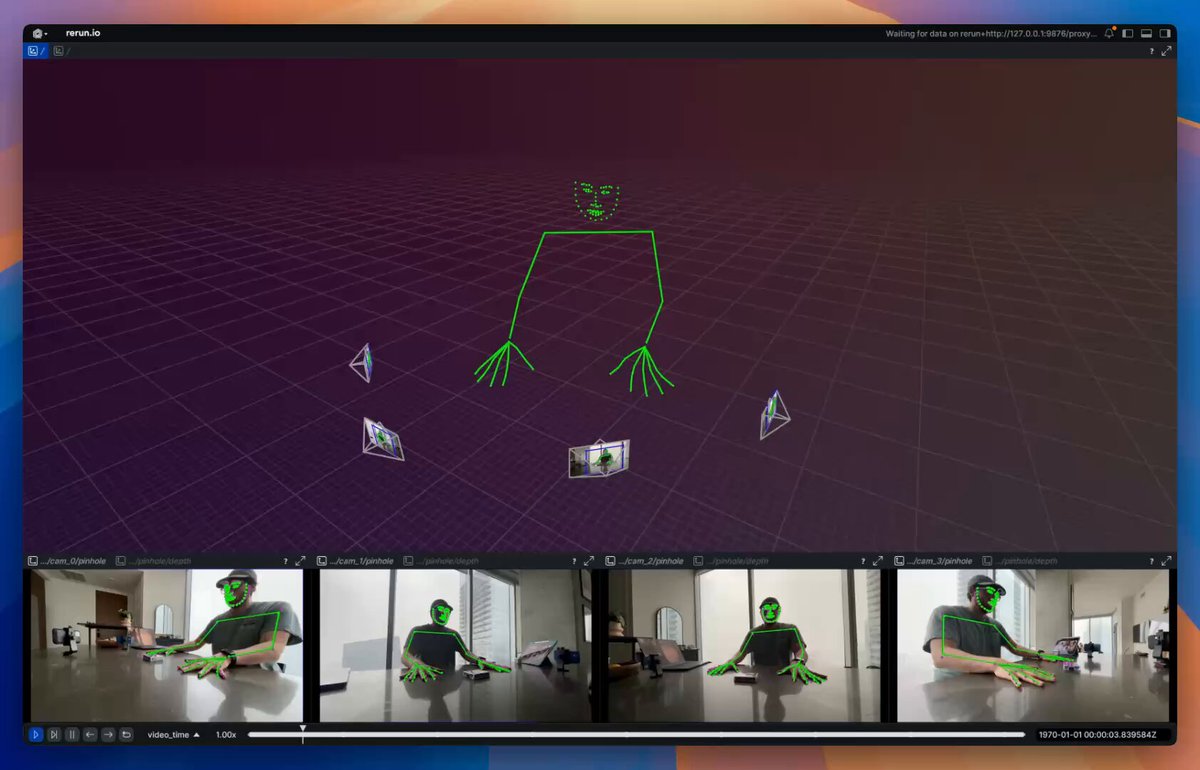
✨ Massive Pipeline Refactor → One Framework for Ego + Exo Datasets, Visualized with Rerun 🚀 After a deep refactoring and cleanup, my entire egocentric/exocentric pipeline is now fully modular. One codebase handles different sensor layouts and generates a unified, multimodal timeseries RRD file that you can open instantly... show more

20,836 görüntüleme • 1 yıl önce •via X (Twitter)
3 Yorum

Pablo Vela1 yıl önce
Try it / follow along Code is landing in the pi0-lerobot repo (hand‑kinematic‑fitting branch): < The current viewer can be found here: < Stay tuned—Gradio front‑end + full‑body exo labels up next!

Himanshu Kumar1 yıl önce
@rerundotio Intriguing, a unified pipeline could streamline varied data analysis in unexpected ways.

Astrid Wilde 🌞1 yıl önce
@rerundotio are you looking for work? if so call me