Loading video...
Video Failed to Load
Today at Meta FAIR we’re announcing three new cutting-edge developments in robotics and touch perception — and releasing a collection of artifacts to empower the community to build on this work. Details on all of this new work ➡️ 1️⃣ Meta Sparsh is the first general-purpose encoder for vision-based... show more

453,035 views • 1 year ago •via X (Twitter)
10 Comments

To make these advancements more accessible for different applications, we’re partnering with @GelSight and Wonik Robotics to develop and commercialize these touch-sensing innovations. We’re excited about how this will enable the community to contribute and drive progress in this space.
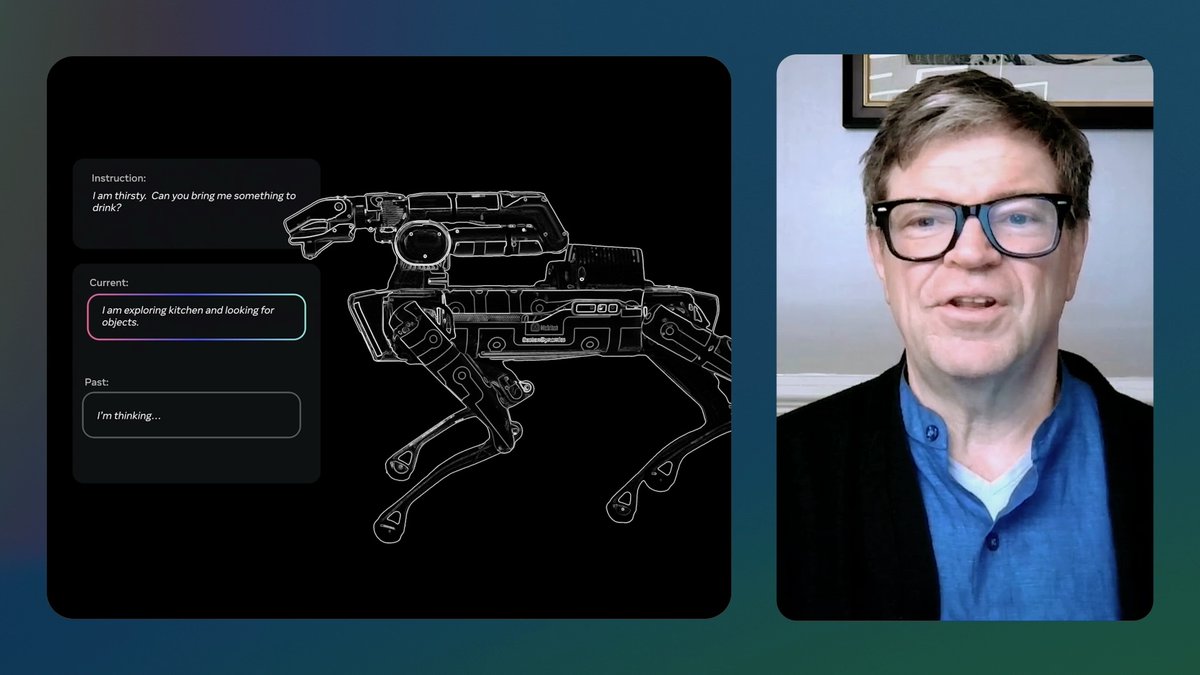
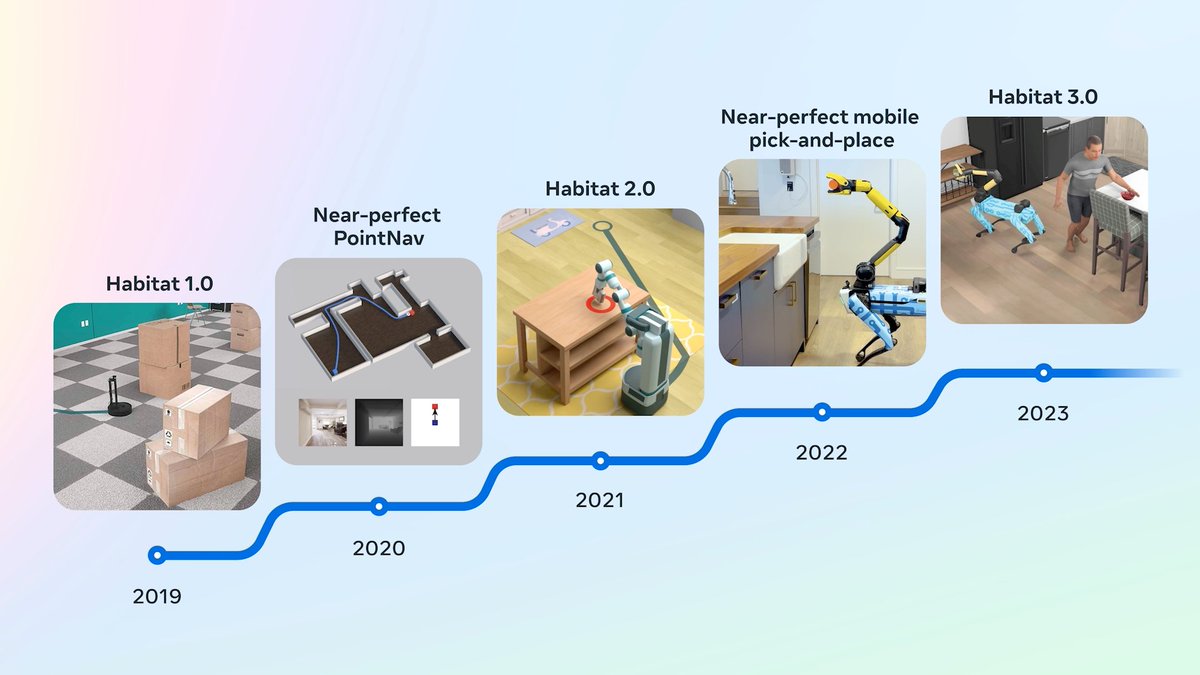
Additionally, looking towards the future, we’re releasing PARTNR: a benchmark for Planning And Reasoning Tasks in humaN-Robot collaboration. Built on Habitat 3.0, it’s the largest benchmark of its kind to study and evaluate human-robot collaboration in household activities By providing a standardized benchmark and dataset we hope to enable new research on robots that can not only operate in isolation, but in collaboration with people. Details and code ➡️

insane, love the name as well: sparsh (in hindi) literally translates to “touch” we need more hindi names :)

Robotics research that is open source too? Holy shit I love you guys

::pokes you::

how long until this

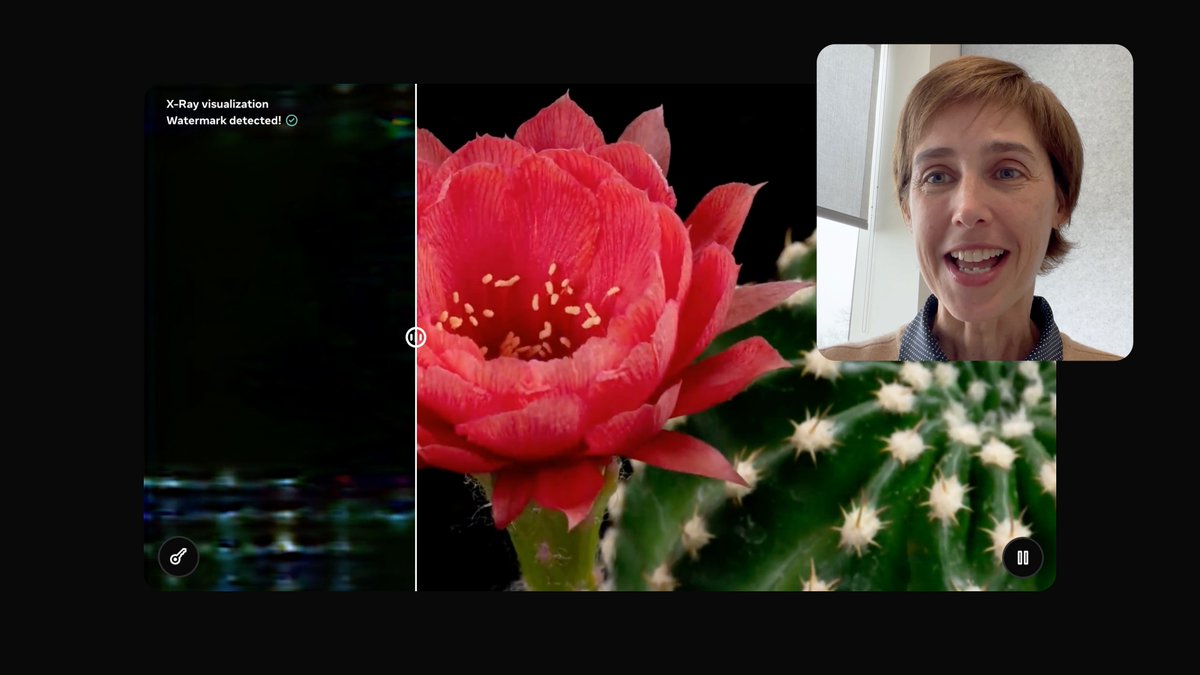
Meta Sparsh: The paper introduces a family of general-purpose touch representations called "Sparsh" that are trained using self-supervised learning (SSL) techniques. The authors aim to develop touch representations that can work well across various vision-based tactile sensors and tasks, without the need for extensive labeled data. The authors find that the "Sparsh" representations, especially those trained using DINO and IJEPA, outperform task and sensor-specific end-to-end models by 95.1% on average across the "TacBench" tasks, when using limited labeled data (33-50%). "Sparsh" representations show strong performance in tasks like force estimation, slip detection, pose estimation, and grasp stability, even with as little as 10-33% of the labeled data. full paper:

When are the metabots coming?

Is it just me or y'all realize this is some groundbreaking stuff?

this is so cool -- excited to learn more about it



![Now all you need to make tactile sensors is a 3D printer, magnets, and magnetometers! [📍It’s open source!] A new tactile sensor, called e-Flesh, with a simple working principle… measure deformations in 3D printable microstructures. Since e-Flesh is 3D printable, you can make it in all shapes and sizes for applications ranging from foot fall sensing to multifingered hands. This is critical in getting touch not just on fingertips, but all around robots. eFlesh can democratize touch sensing with open-sourced❗️ Make your own: Paper:](https://image.24vids.com/tw-2016435125748195360/ext_tw_video_thumb/2016435078042091520/pu/img/8i_W71gTHllqxvGB.jpg)