

RAI Institute
@rai_inst • 7,842 subscribers
We aim to solve the most important and fundamental problems in robotics and AI. (Formerly The AI Institute)
Shorts

Videos


See Spot perform dynamic whole-body manipulation. Using a combination of reinforcement learning (RL) and sampling-based control, the robot is able to autonomously drag, roll, and stack tires weighing 15 kg (33 lb), well above its maximum arm lift capacity. Learn more about coordinating locomotion and manipulation processes:
RAI Institute87,525 views • 9 months ago

One approach to collecting data for contact-rich manipulation is handheld grippers. These devices let the operator feel contact with objects and the environment directly through the mechanism. To make sure the data collected transfers to the robot, we've co-designed handheld and robot grippers: same linkage mechanisms, same degrees of freedom, same force transmission. The Koala platform lets the human feel through the linkages what the robot will feel through its actuators. Watch to learn more about our gripper designs, data collection approach, and policy training:
RAI Institute23,201 views • 2 months ago

Using reinforcement learning we have expanded the range of techniques the Ultra Mobile Vehicle (UMV) uses to handle terrain and obstacles, including hops, out-of-plane balance, and level-ground flips. Millions of physics-based simulations provide training data to support zero-shot transfers.
RAI Institute75,124 views • 10 months ago

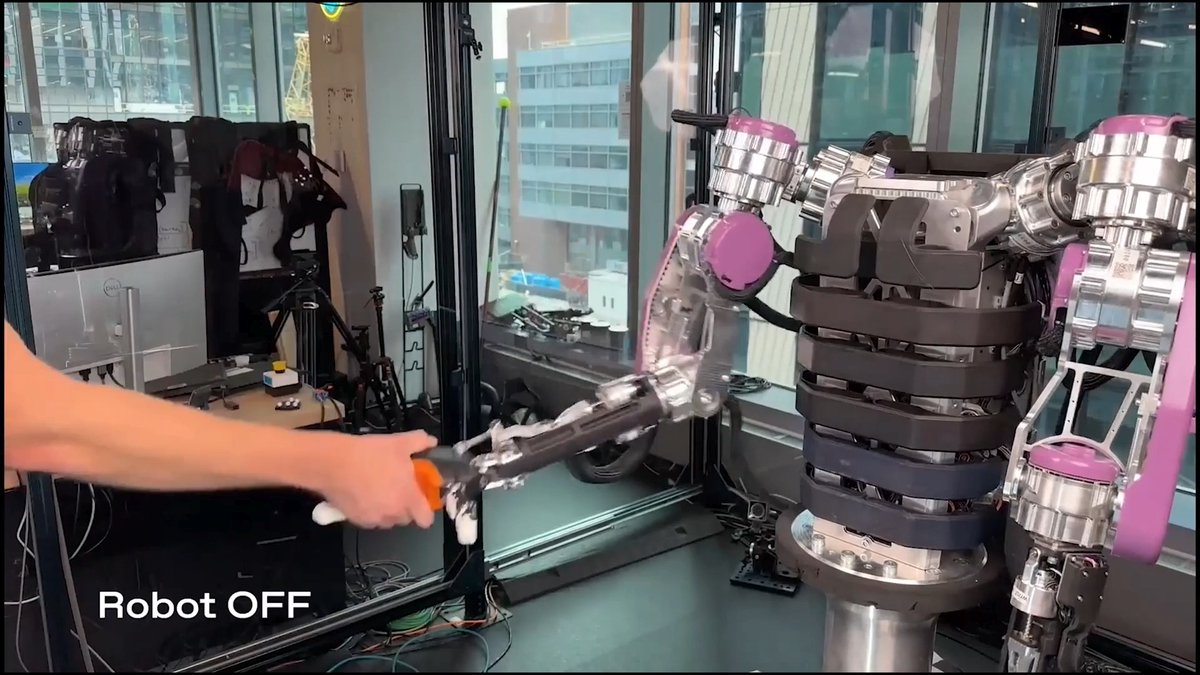
Happy #NationalRoboticsWeek! Last year, we gave you a sneak peek at AthenaZero, our robotic manipulator built to tackle dynamic tasks like a human arm. Learn more about how this fast, precise robot can switch in an instant from a gentle touch to high force depending on what the task requires:
RAI Institute23,415 views • 3 months ago

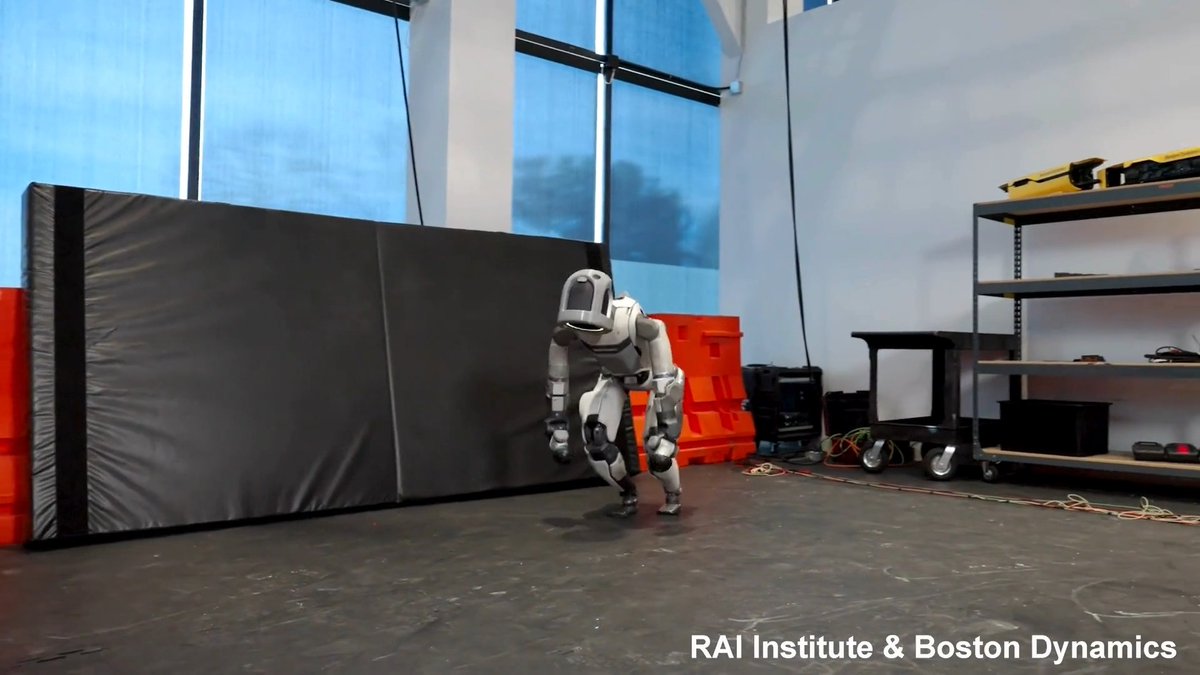
Atlas can perform a backflip combo like a gymnast and also walk naturally across a stage. These very different movements are enabled by the whole-body learning framework developed by the RAI Institute and deployed by Boston Dynamics. We’re getting closer to robust, generalist humanoid behaviors that transfer zero-shot from simulation to physical performance:
RAI Institute27,246 views • 5 months ago
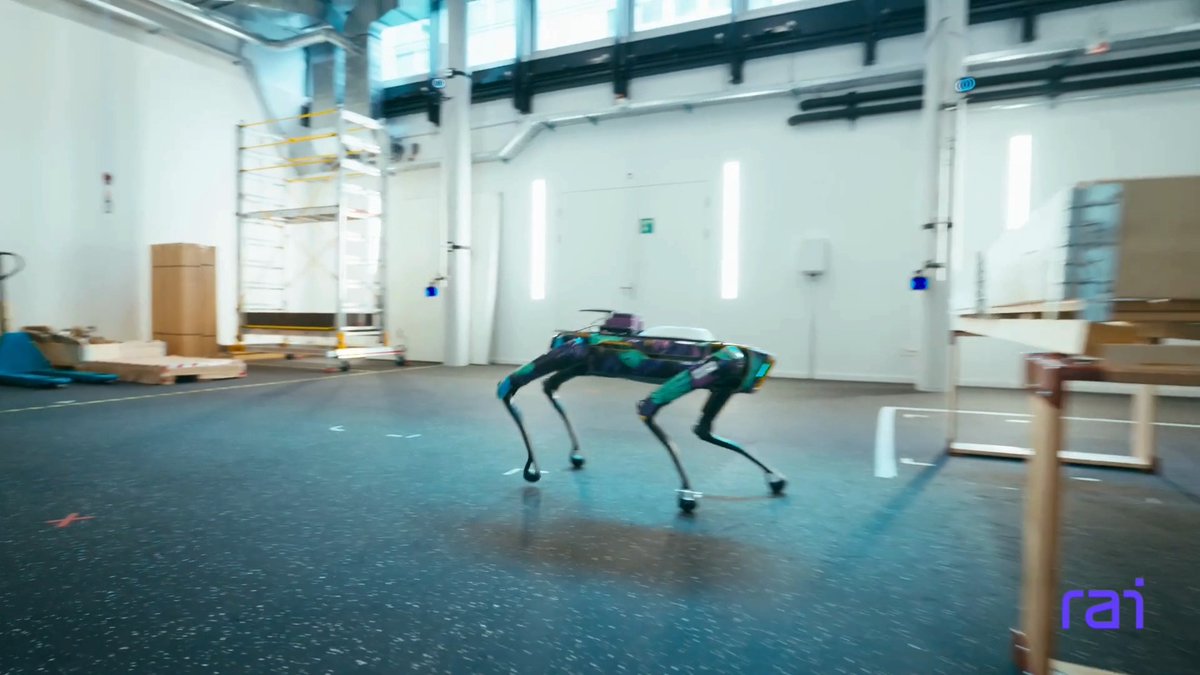
Watch Spot crouch, jump, climb boxes and leap across gaps, controlled by a neural network trained with reinforcement learning (RL) and multi-expert distillation. Multiple expert policies were trained and distilled together into a single policy that was fine tuned to improve performance over diverse terrains. This work was inspired by ANYmal’s parkour capabilities. The neural network processes depth data from Spot's sensors to construct an understanding of the environment.
RAI Institute14,768 views • 2 months ago
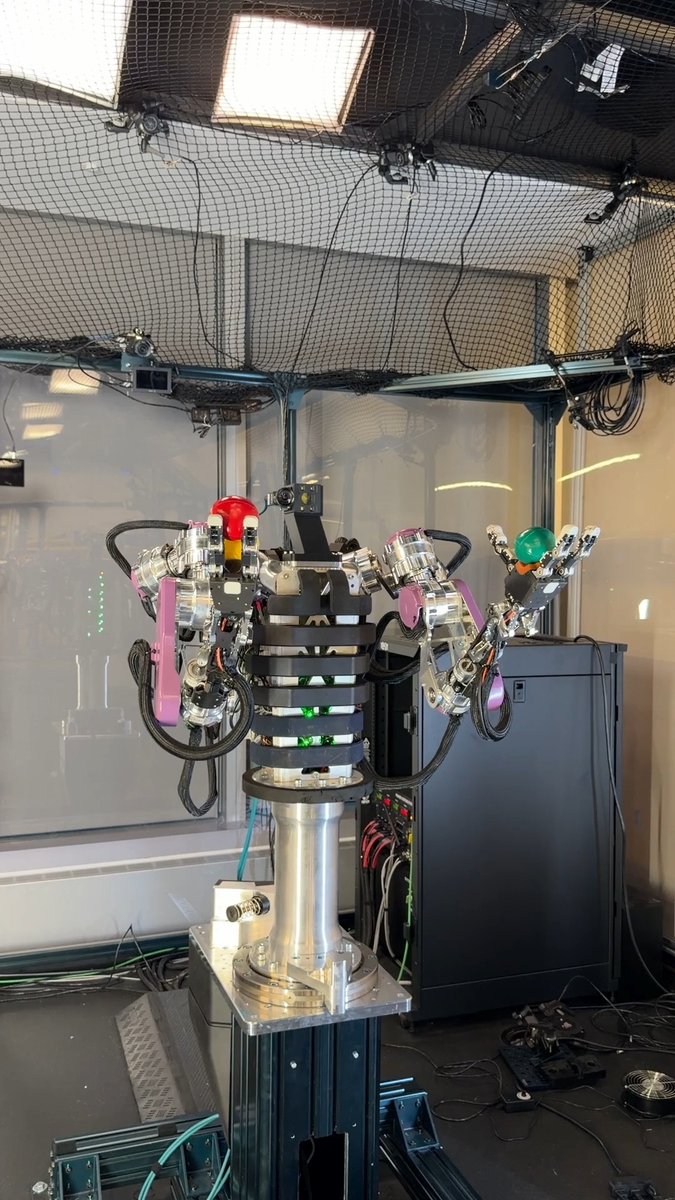
![Dynamic manipulation steps up to the plate! This is a first look at a low-impedance platform designed to study how robots manipulate objects. In this demo, two robots play catch and practice batting, even teaming up with humans. The robots are capable of throwing 70mph [112 kph] and can catch and bat at short distances (23ft [7m]) :](https://image.24vids.com/tw-1991175062083281202/media/G6ITJeNXsAAzXNa.jpg)
Dynamic manipulation steps up to the plate! This is a first look at a low-impedance platform designed to study how robots manipulate objects. In this demo, two robots play catch and practice batting, even teaming up with humans. The robots are capable of throwing 70mph [112 kph] and can catch and bat at short distances (23ft [7m]) :
RAI Institute25,497 views • 8 months ago

Researchers from RAI Institute present Diffuse-CLoC, a new control policy that fuses kinematic motion diffusion models with physics-based control to produce motions that are both physically realistic and precisely controllable. This breakthrough moves us closer to developing generalist policies that enable humanoid robots to perform diverse tasks, including dynamic locomotion and contact-rich manipulation, in a natural-looking and robust way. Learn more at
RAI Institute13,426 views • 11 months ago
No more content to load