Video yükleniyor...
Video Yüklenemedi
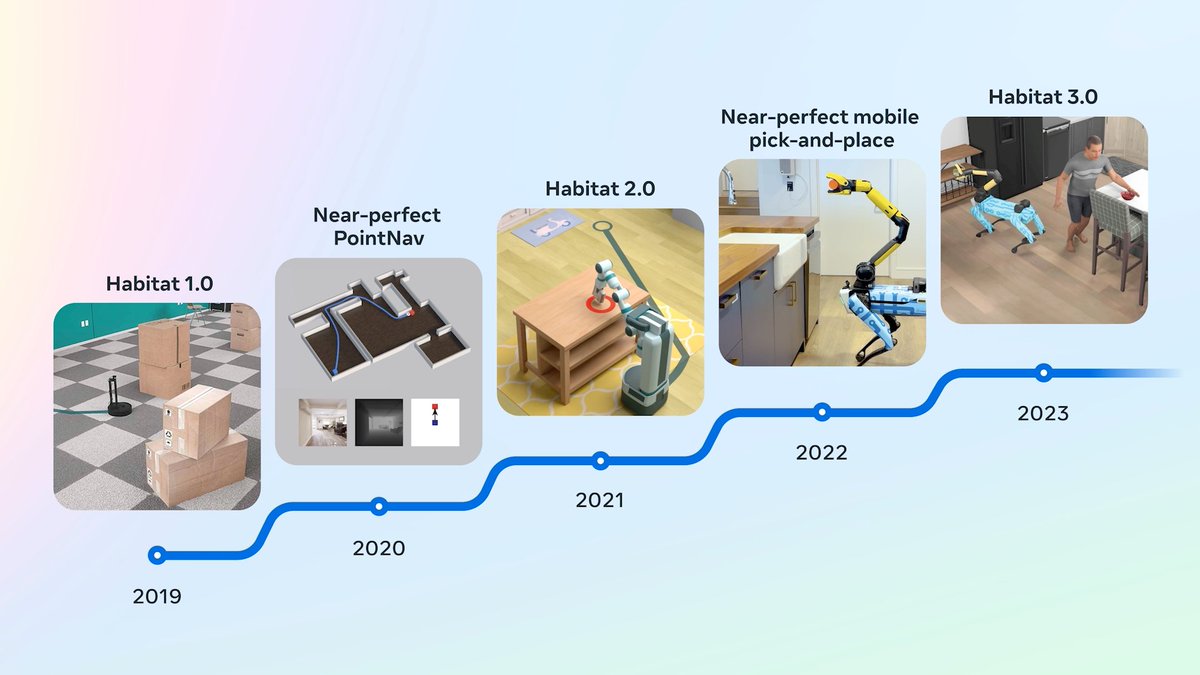
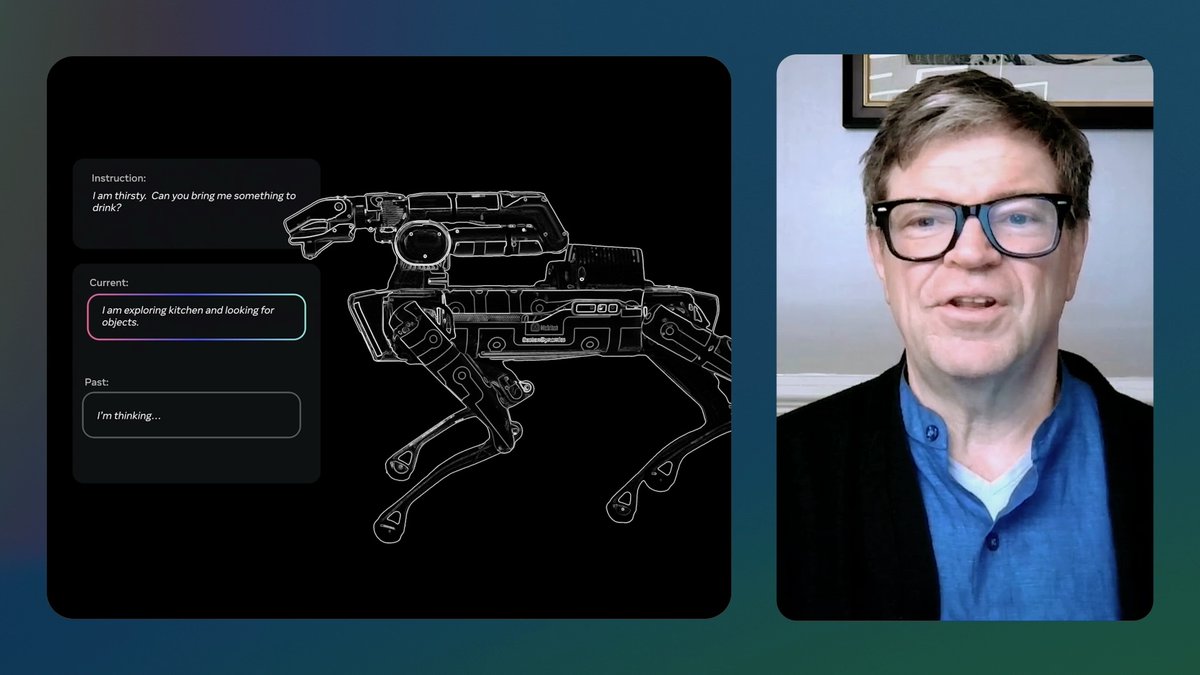
Meta PARTNR is a research framework supporting seamless human-robot collaboration. Building on our research with Habitat, we’re open sourcing a large-scale benchmark, dataset and large planning model that we hope will enable the community to effectively train social robots.

106,951 görüntüleme • 1 yıl önce •via X (Twitter)
11 Yorum

More on our newest releases and impact of the open source work developed by Meta FAIR ➡️

Togoda is Google on Steroids with AI summaries . 🚀 The only thematic AI search engine.👀 It's 100% private with third party proxy. 🧨 Try it today & experience the difference! 👉Follow us @togoda_com 👈 🚀Help us grow & share this post!🚀

Training social robots? We've got the humans for that! 😉 500,000+ contributors ready to teach bots manners (and maybe some dance moves). Check out our premium training data. #PublicAI

Truly Open AI 🔥

yeah, this is really cool actually. but i won't recant metaai is still trash

That's quite the development for human-robot collaboration

@AIatMeta, open source creates immense opportunities for innovation. 🌟

@AIatMeta, exciting developments ahead! The blend of open source with Meta FAIR’s innovations could reshape our tech landscape in meaningful ways. How do you see this influencing future projects? 🌟 #Innovation

This is super intriguing! Agents are cool, but when that AI goes into a robot, that is what will make AI very powerful.

Are these robos self-cleaning?

Research 🔬