正在加载视频...
视频加载失败
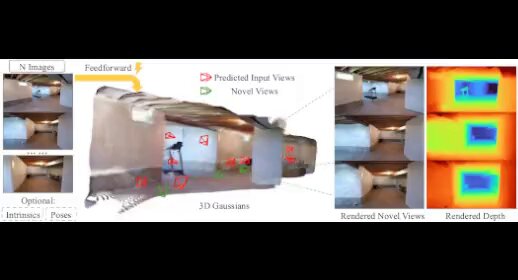
GPS-Gaussian+: Generalizable Pixel-wise 3D Gaussian Splatting for Real-Time Human-Scene Rendering from Sparse Views TL;DR: Are we witnessing the first steps towards 3DGS live streaming? Contributions: • We introduce a generalizable 3D Gaussian Splatting methodology that employs pixel-wise Gaussian parameter maps defined on 2D source image planes to formulate 3D... show more

7 条评论

MrNeRF1 年前
Paper: Project:

Dominick Romano1 年前
Look at all those cameras they call that sparse view? lol
MrNeRF1 年前
12 is sparse!

Dawid Ryś1 年前
Whoa! it would be perfect to watch on volumetric displays from @LKGGlass

まお(松岡洋)1 年前
視差がこれだけあれば良いのか!

Memory Leaks1 年前
I'm trying to find the source code but the repo link is dead
MrNeRF1 年前
They didn't upload it yet? That's likely the case.